Submerged Pothole Detection
Goal
To develop a means of detecting water-covered potholes in an underground gold mine.
Preamble
This extensive gold mine, situated over one kilometre below the ground surface, was traversed by many kilometres of concrete-paved roadway. Automated trucks encountering obstacles or submerged potholes, would be susceptible to veering off course and into the tunnel walls, causing significant damage. The project aimed to provide a means to detect these under-water potholes using a Lidar camera, in order to prevent damage to the vehicles.
Data
The water-covered potholes were simulated by filling concrete-covered sections of road with water. An Ouster LiDAR was used to record the scene, and transmit data (via cable) to a nearby laptop computer which contained the appropriate processing software.

The data consisted of the point cloud data in Ouster Lidar format.
Method
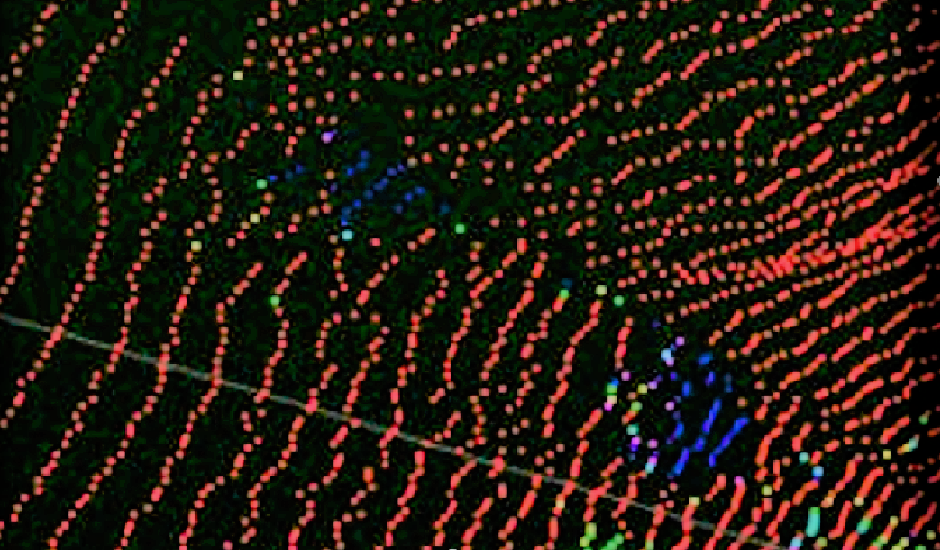
The resultant point cloud was explored and analysed, where it was found that laser signals returned from the water-covered surface had been attenuated relative to those returned from solid material. In fact, particular wavelength ranges could be isolated that were found to correspond to the water-covered areas.

This point cloud data was then flattened (dimensionally reduced) to two dimensions and run through K-Means clustering. In this way, the water-covered concrete areas were able to clearly be identified.

published June 30, 2020